Scheduling an Observing Run#
Note
Some terms used have been defined in Terminology.
Contents#
Defining Targets#
We want to observe Deneb and M13 in the B, V and R filters. We are scheduled for the first half-night on July 6 2016 and want to know the order we should schedule the targets in.
First we define our Observer object (where we are observing from):
>>> from astroplan import Observer
>>> apo = Observer.at_site('apo')
Now we want to define our list of targets (FixedTarget objects),
any object that is in SIMBAD can be called by an identifier.
>>> from astroplan import FixedTarget
>>> # Initialize the targets
>>> deneb = FixedTarget.from_name('Deneb')
>>> m13 = FixedTarget.from_name('M13')
>>> deneb
<FixedTarget "deneb" at SkyCoord (ICRS): (ra, dec) in deg (310.35797975, 45.28033881)>
>>> m13
<FixedTarget "M13" at SkyCoord (ICRS): (ra, dec) in deg (250.423475, 36.4613194)>
We also need to define bounds within which our blocks will be scheduled
using Time objects. Our bounds will be from the noon
before our observation, to the noon after (19:00 UTC). Later we will
account for only being able to use the first half of the night.
>>> from astropy.time import Time
>>> noon_before = Time('2016-07-06 19:00')
>>> noon_after = Time('2016-07-07 19:00')
Creating Constraints and Observing Blocks#
An in-depth tutorial on creating and using constraints can be found in the constraint tutorial.
Constraints, when evaluated, take targets and times, and give scores that
indicate how well the combination of target and time fulfill the constraint.
We want to make sure that our targets will be high in the sky while observed
and that they will be observed during the night. We don’t want any object to
be observed at an airmass greater than 3, but we prefer a better airmass.
Usually constraints scores are boolean, but with boolean_constraint = False
the constraint will output floats instead, indicated when it is closer to ideal.
>>> from astroplan.constraints import AtNightConstraint, AirmassConstraint
>>> # create the list of constraints that all targets must satisfy
>>> global_constraints = [AirmassConstraint(max = 3, boolean_constraint = False),
... AtNightConstraint.twilight_civil()]
Now that we have constraints that we will apply to every target, we need to
create an ObservingBlock for each target+configuration
combination. An observing block needs a target, a duration, and a priority;
configuration information can also be given (i.e. filter, instrument, etc.).
For each filter we want 16 exposures per target (100 seconds for M13 and 60
seconds for Deneb) and the instrument has a read-out time of 20 seconds.
The half night goes from 7PM local time to 1AM local time, in UTC this will
be from 2AM to 8AM, so we use TimeConstraint.
>>> from astroplan import ObservingBlock
>>> from astroplan.constraints import TimeConstraint
>>> from astropy import units as u
>>> # Define the read-out time, exposure duration and number of exposures
>>> read_out = 20 * u.second
>>> deneb_exp = 60*u.second
>>> m13_exp = 100*u.second
>>> n = 16
>>> blocks = []
>>> half_night_start = Time('2016-07-07 02:00')
>>> half_night_end = Time('2016-07-07 08:00')
>>> first_half_night = TimeConstraint(half_night_start, half_night_end)
>>> # Create ObservingBlocks for each filter and target with our time
>>> # constraint, and durations determined by the exposures needed
>>> for priority, bandpass in enumerate(['B', 'G', 'R']):
... # We want each filter to have separate priority (so that target
... # and reference are both scheduled)
... b = ObservingBlock.from_exposures(deneb, priority, deneb_exp, n, read_out,
... configuration = {'filter': bandpass},
... constraints = [first_half_night])
... blocks.append(b)
... b = ObservingBlock.from_exposures(m13, priority, m13_exp, n, read_out,
... configuration = {'filter': bandpass},
... constraints = [first_half_night])
... blocks.append(b)
Creating a Transitioner#
Now that we have observing blocks, we need to define how the telescope transitions between them. The first parameter needed is the slew_rate of the telescope (degrees/second) and the second is a dictionary that tells how long it takes to transition between two configurations. You can also give a default duration if you aren’t able to give one for each pair of configurations.
>>> from astroplan.scheduling import Transitioner
>>> # Initialize a transitioner object with the slew rate and/or the
>>> # duration of other transitions (e.g. filter changes)
>>> slew_rate = .8*u.deg/u.second
>>> transitioner = Transitioner(slew_rate,
... {'filter':{('B','G'): 10*u.second,
... ('G','R'): 10*u.second,
... 'default': 30*u.second}})
The transitioner now knows that it takes 10 seconds to go from ‘B’ to ‘G’, or from ‘G’ to ‘R’ but has to use the default transition time of 30 seconds for any other transition between filters. Non-transitions, like ‘g’ to ‘g’, will not take any time though.
Scheduling#
Now all we have left is to initialize the scheduler, input our list of blocks and the schedule to put them in. There are currently two schedulers to choose from in astroplan.
The first is a sequential scheduler. It starts at the start_time and scores each block (constraints and target) at that time and then schedules it, it then moves to where the first observing block stops and repeats the scoring and scheduling on the remaining blocks.
>>> from astroplan.scheduling import SequentialScheduler
>>> from astroplan.scheduling import Schedule
>>> # Initialize the sequential scheduler with the constraints and transitioner
>>> seq_scheduler = SequentialScheduler(constraints = global_constraints,
... observer = apo,
... transitioner = transitioner)
>>> # Initialize a Schedule object, to contain the new schedule
>>> sequential_schedule = Schedule(noon_before, noon_after)
>>> # Call the schedule with the observing blocks and schedule to schedule the blocks
>>> seq_scheduler(blocks, sequential_schedule)
The second is a priority scheduler. It sorts the blocks by their priority (multiple blocks with the same priority will stay in the order they were in), then schedules them one-by-one at the best time for that block (highest score).
>>> from astroplan.scheduling import PriorityScheduler
>>> # Initialize the priority scheduler with the constraints and transitioner
>>> prior_scheduler = PriorityScheduler(constraints = global_constraints,
... observer = apo,
... transitioner = transitioner)
>>> # Initialize a Schedule object, to contain the new schedule
>>> priority_schedule = Schedule(noon_before, noon_after)
>>> # Call the schedule with the observing blocks and schedule to schedule the blocks
>>> prior_scheduler(blocks, priority_schedule)
Now that you have a schedule there are a few ways of viewing it.
One way is to have it print a table where you can show, or hide,
unused time and transitions with show_transitions and
show_unused (default is showing transitions and not unused).
>>> priority_schedule.to_table()
target start time (UTC) end time (UTC) duration (minutes) ra dec configuration
str15 str23 str23 float64 str32 str32 object
--------------- ----------------------- ----------------------- ------------------ --------------- -------------- -----------------
M13 2016-07-07 03:49:20.019 2016-07-07 04:21:20.019 32.0 250d25m24.51s 36d27m40.7498s {'filter': 'R'}
TransitionBlock 2016-07-07 04:21:20.019 2016-07-07 04:22:00.019 0.666666666667 ['filter:R to B']
M13 2016-07-07 04:25:20.021 2016-07-07 04:57:20.021 32.0 250d25m24.51s 36d27m40.7498s {'filter': 'B'}
TransitionBlock 2016-07-07 04:57:20.021 2016-07-07 04:57:40.021 0.333333333333 ['filter:B to G']
M13 2016-07-07 04:57:40.021 2016-07-07 05:29:40.021 32.0 250d25m24.51s 36d27m40.7498s {'filter': 'G'}
TransitionBlock 2016-07-07 05:29:40.021 2016-07-07 05:31:00.021 1.33333333333 ['filter:G to R']
Deneb 2016-07-07 06:44:00.026 2016-07-07 07:05:20.026 21.3333333333 310d21m28.7271s 45d16m49.2197s {'filter': 'R'}
TransitionBlock 2016-07-07 07:05:20.026 2016-07-07 07:06:00.026 0.666666666667 ['filter:R to G']
Deneb 2016-07-07 07:09:20.027 2016-07-07 07:30:40.027 21.3333333333 310d21m28.7271s 45d16m49.2197s {'filter': 'G'}
TransitionBlock 2016-07-07 07:30:40.027 2016-07-07 07:31:20.027 0.666666666667 ['filter:G to B']
Deneb 2016-07-07 07:34:40.028 2016-07-07 07:56:00.028 21.3333333333 310d21m28.7271s 45d16m49.2197s {'filter': 'B'}
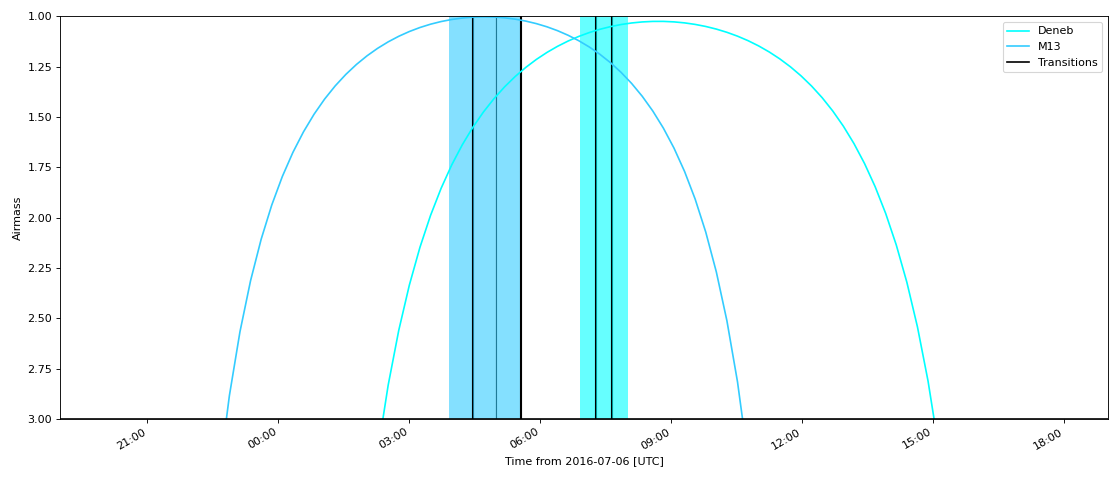
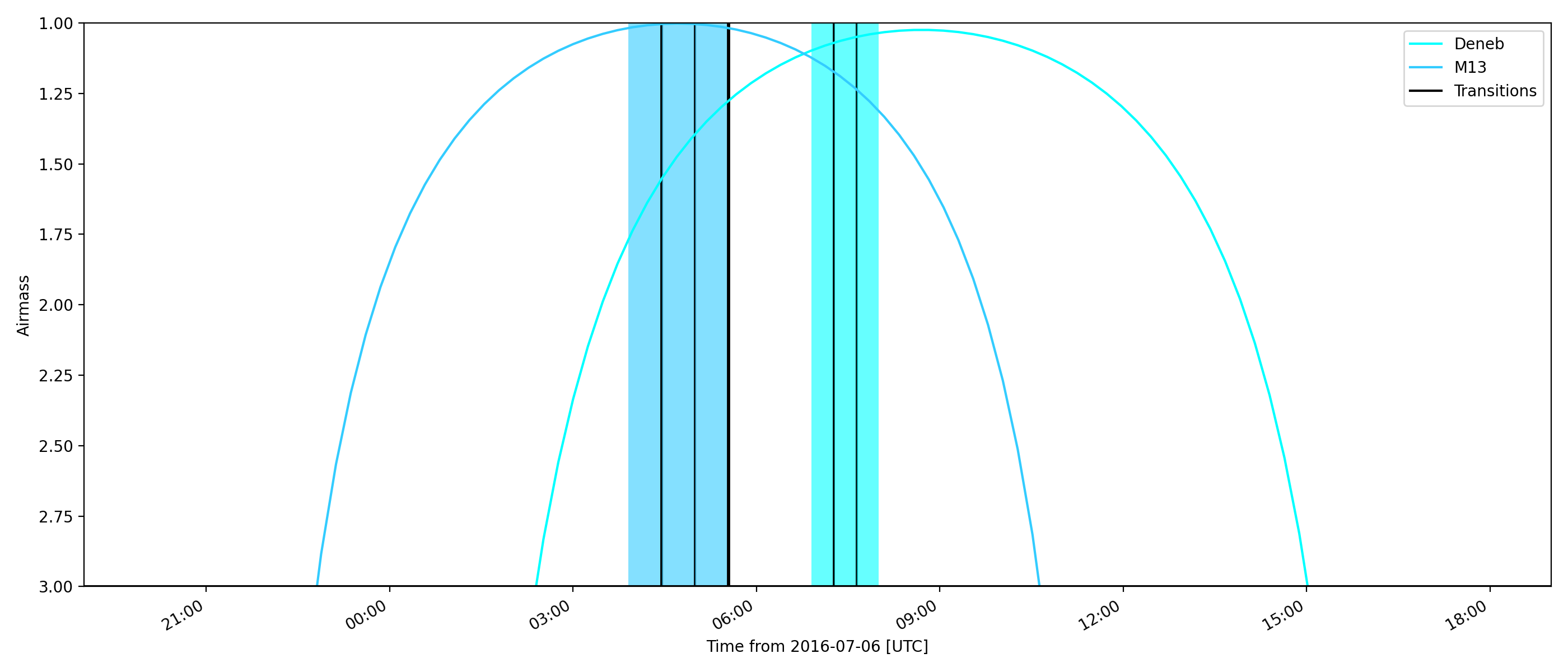
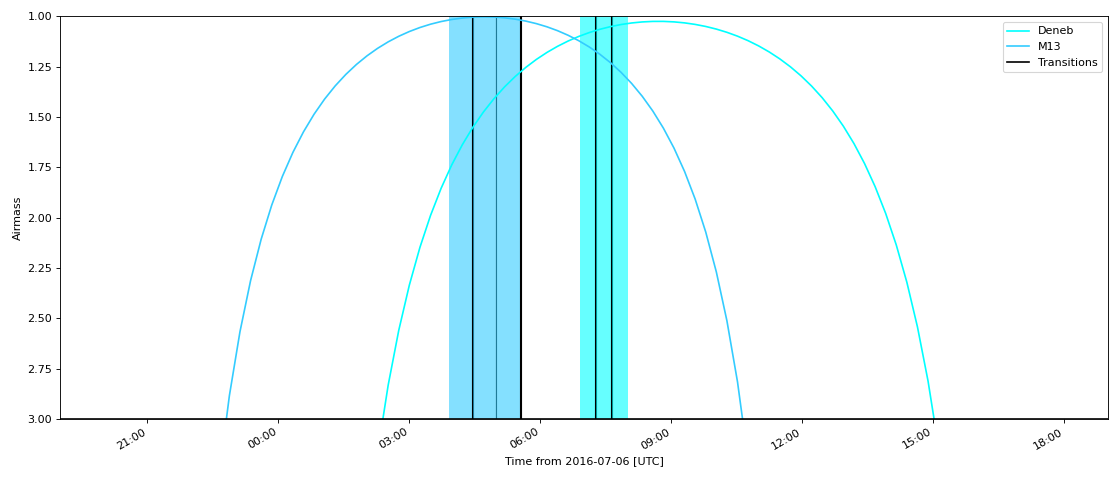
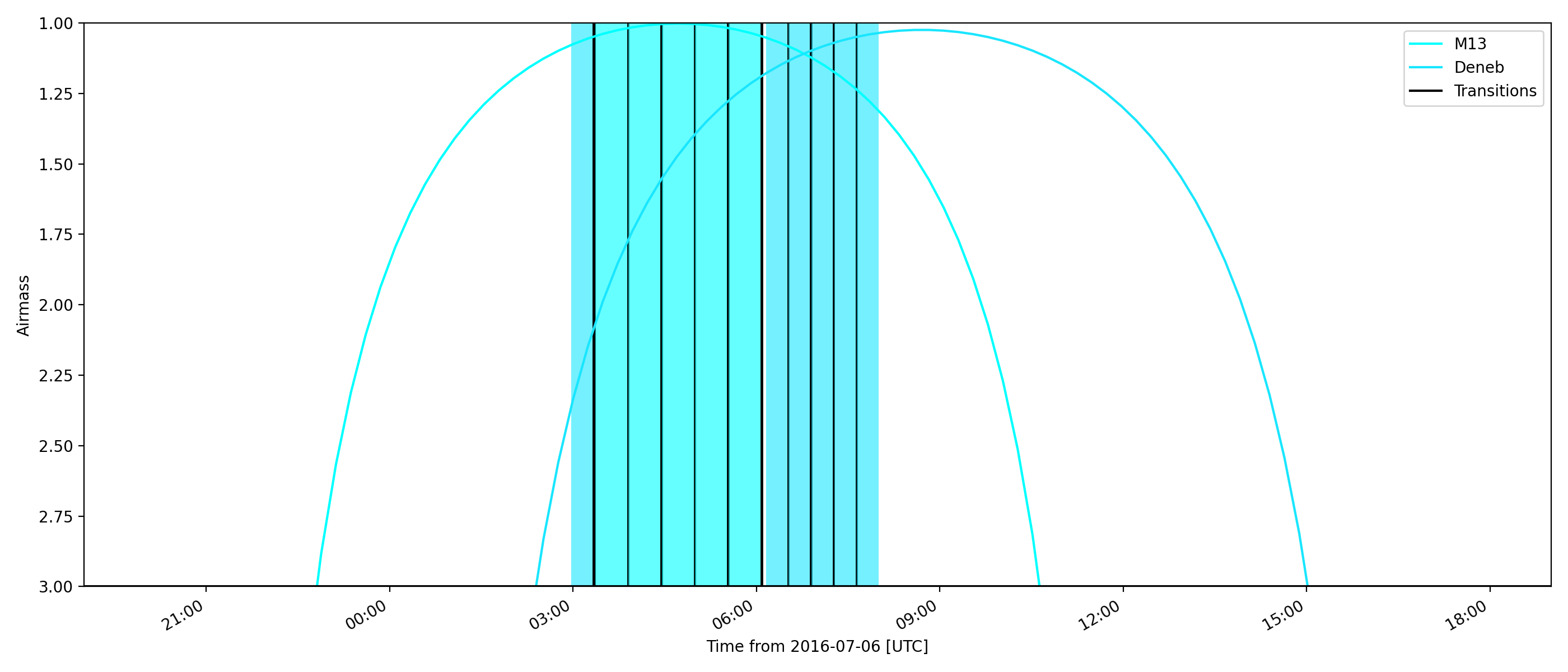
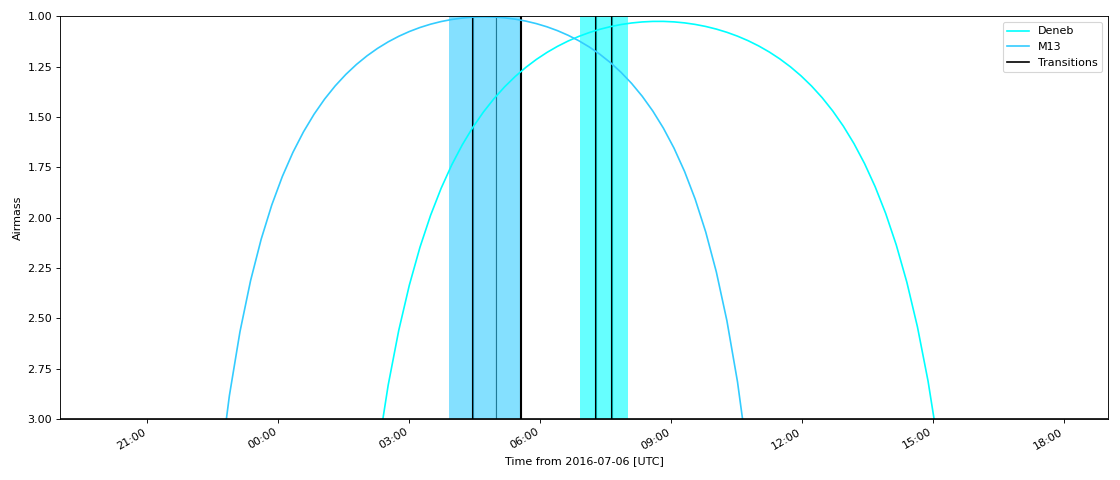
The other way is to plot the schedule against the airmass of the targets.
>>> from astroplan.plots import plot_schedule_airmass
>>> import matplotlib.pyplot as plt
>>> # plot the schedule with the airmass of the targets
>>> plt.figure(figsize = (14,6))
>>> plot_schedule_airmass(priority_schedule)
>>> plt.legend(loc = "upper right")
>>> plt.show()
(Source code, png, hires.png, pdf, svg)
{kind=link}
{kind=link}
{kind=link}
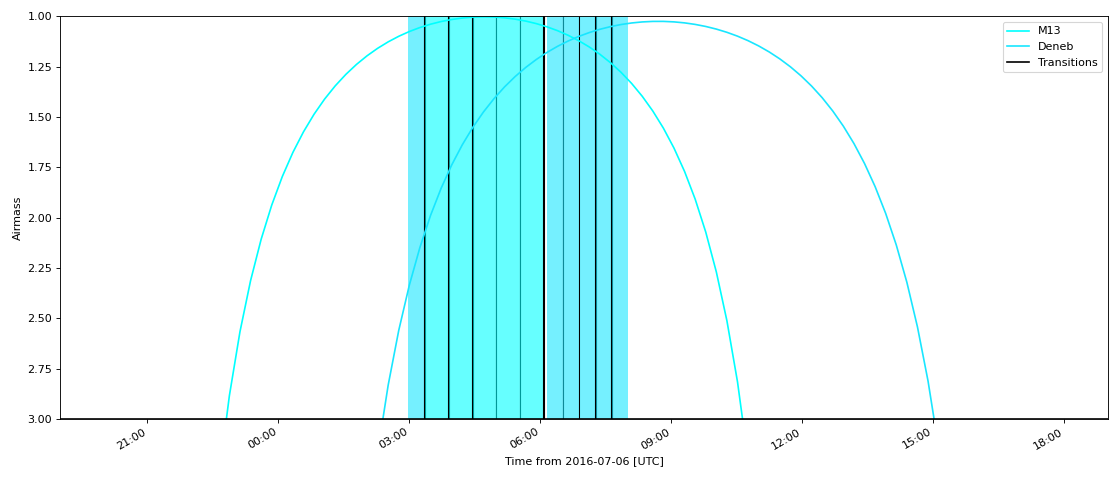
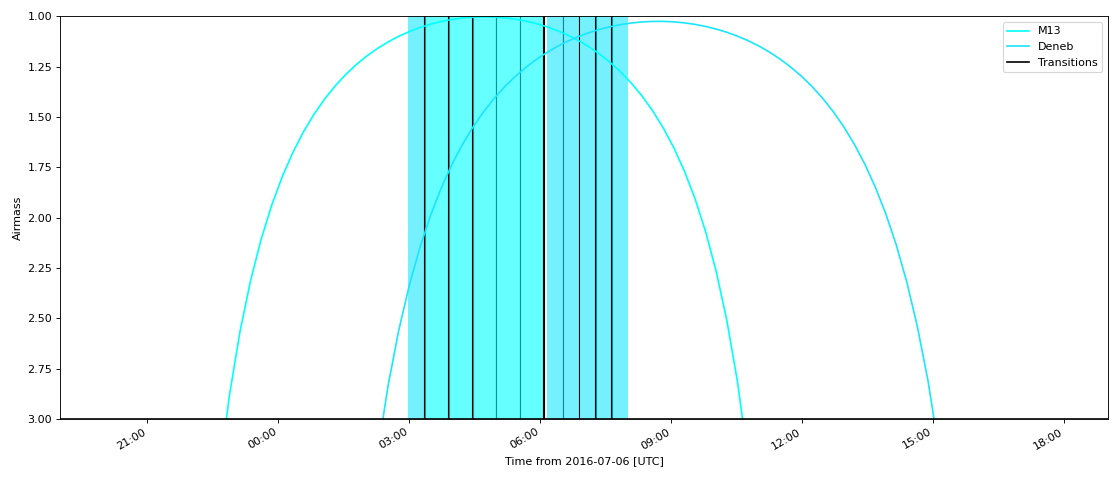
There is a lot of unfilled space in our schedule currently. We can fill that time with more observations of our targets by calling our scheduler using the same blocks and the schedule we already added to.
>>> prior_schedule(blocks, priority_schedule)
>>> plt.figure(figsize = (14,6))
>>> plot_schedule_airmass(priority_schedule)
>>> plt.legend(loc = "upper right")
>>> plt.show()
(Source code, png, hires.png, pdf, svg)
{kind=link}
{kind=link}
{kind=link}
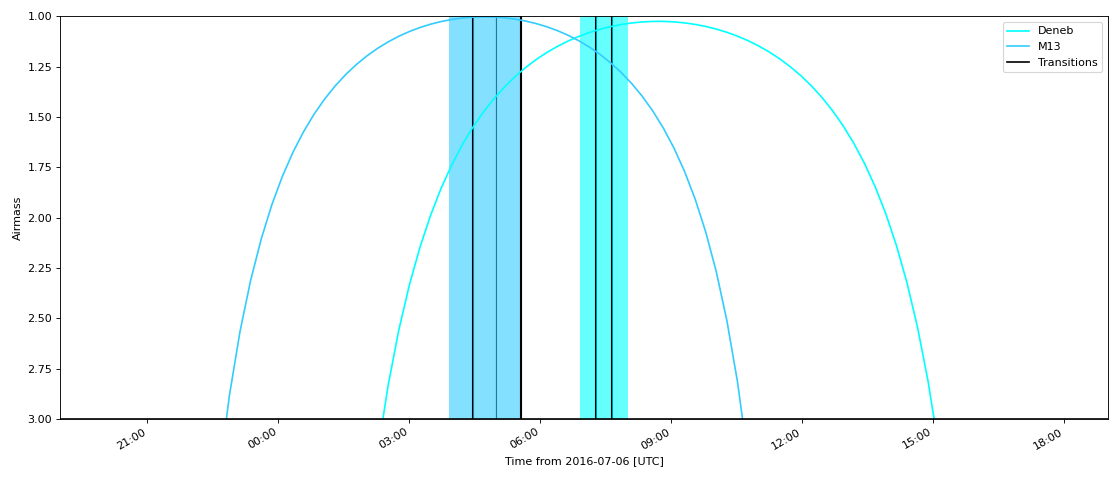
We want to check if there is any way that we could observe Alpha Centauri A as well during our time slot. So we create a new block for it with priority over the others, add it to our list of blocks and run the priority scheduler again.
>>> alpha_cen = FixedTarget.from_name('Alpha Centauri A')
>>> # ObservingBlocks can also be called with arguments: target, duration, priority
>>> blocks.append(ObservingBlock(alpha_cen, 20*u.minute, -1))
>>> # Initialize a new schedule for this test
>>> schedule = Schedule(start_time, end_time)
>>> prior_scheduler(blocks, schedule)
>>> plt.figure(figsize = (14,6))
>>> plot_schedule_airmass(priority_schedule)
>>> plt.legend(loc = "upper right")
>>> plt.show()
(Source code, png, hires.png, pdf, svg)
{kind=link}
{kind=link}
{kind=link}
Nothing new shows up because Alpha Centauri isn’t visible from APO.
User-Defined Schedulers#
There are many ways that targets can be scheduled, only two of which
are currently implemented. This example will walk through the steps for
creating your own scheduler that will be compatible with the tools of
the scheduling module.
As you may have noticed above, the schedulers are assembled by making a
call to the initializer of the class (e.g. PriorityScheduler).
Each of the schedulers is subclassed from the abstract astroplan.scheduling.Scheduler
class, and our custom scheduler needs to be as well.
A scheduler needs to be able to schedule observing blocks where they have a non-zero
score (i.e. they satisfy all of their constraints). For our scheduler, we will make
one that schedules ObservingBlocks at the first unoccupied place they have a score
greater than zero: a SimpleScheduler. We need to include two methods, __init__
and _make_schedule for it to work:
The
__init__is already defined by the super class, and accepts global constraints, theObserver, theTransitioner, agap_time, and atime_resolutionfor spacing during the creation of the schedule.It also needs a
_make_scheduleto do the heavy lifting. This takes a list ofObservingBlockobjects and aScheduleobject to input them into. This method needs to be able to check whether a block can be scheduled in a given spot, and be able to insert it into the schedule once a suitable spot has been found. For score evaluation we will use the built-inScorer.
Here’s the SimpleScheduler implementation:
from astroplan.scheduling import Scheduler, Scorer
from astroplan.utils import time_grid_from_range
from astroplan.constraints import AltitudeConstraint
from astropy import units as u
import numpy as np
class SimpleScheduler(Scheduler):
"""
schedule blocks randomly
"""
def __init__(self, *args, **kwargs):
super(SimpleScheduler, self).__init__(*args, **kwargs)
def _make_schedule(self, blocks):
# gather all the constraints on each block into a single attribute
for b in blocks:
if b.constraints is None:
b._all_constraints = self.constraints
else:
b._all_constraints = self.constraints + b.constraints
# to make sure the Scorer has some constraint to work off of
# and to prevent scheduling of targets below the horizon
if b._all_constraints is None:
b._all_constraints = [AltitudeConstraint(min=0*u.deg)]
b.constraints = [AltitudeConstraint(min=0*u.deg)]
elif not any(isinstance(c, AltitudeConstraint) for c in b._all_constraints):
b._all_constraints.append(AltitudeConstraint(min=0*u.deg))
if b.constraints is None:
b.constraints = [AltitudeConstraint(min=0*u.deg)]
else:
b.constraints.append(AltitudeConstraint(min=0*u.deg))
b.observer = self.observer
# before we can schedule, we need to know where blocks meet the constraints
scorer = Scorer(blocks, self.observer, self.schedule,
global_constraints=self.constraints)
score_array = scorer.create_score_array(self.time_resolution)
# now we have an array of the scores for the blocks at intervals of
# ``time_resolution``. The scores range from zero to one, some blocks may have
# higher scores than others, but we only care if they are greater than zero
# we want to start from the beginning and start scheduling
start_time = self.schedule.start_time
current_time = start_time
while current_time < self.schedule.end_time:
scheduled = False
i=0
while i < len(blocks) and scheduled is False:
block = blocks[i]
# the schedule starts with only 1 slot
if len(self.schedule.slots) == 1:
test_time = current_time
# when a block is inserted, the number of slots increases
else:
# a test transition between the last scheduled block and this one
transition = self.transitioner(schedule.observing_blocks[-1],
block, current_time, self.observer)
test_time = current_time + transition.duration
# how many time intervals are we from the start
start_idx = int((test_time - start_time)/self.time_resolution)
duration_idx = int(block.duration/self.time_resolution)
# if any score during the block's duration would be 0, reject it
if any(score_array[i][start_idx:start_idx+duration_idx] == 0):
i +=1
# if all of the scores are >0, accept and schedule it
else:
if len(self.schedule.slots) >1:
self.schedule.insert_slot(current_time, transition)
self.schedule.insert_slot(test_time, block)
# advance the time and remove the block from the list
current_time = test_time + block.duration
scheduled = True
blocks.remove(block)
# if every block failed, progress the time
if i == len(blocks):
current_time += self.gap_time
return schedule
Then to use our new scheduler, we just need to call it how we did up above:
>>> from astroplan.constraints import AtNightConstraint
>>> from astroplan.scheduling import Schedule, ObservingBlock
>>> from astroplan import FixedTarget, Observer, Transitioner
>>> from astropy.time import Time
>>> # Initialize the observer and targets, and create observing blocks
>>> apo = Observer.at_site('apo')
>>> deneb = FixedTarget.from_name('Deneb')
>>> m13 = FixedTarget.from_name('M13')
>>> blocks = [ObservingBlock(deneb, 20*u.minute, 0)]
>>> blocks.append(ObservingBlock(m13, 20*u.minute, 0))
>>> # For a telescope that can slew at a rate of 2 degrees/second
>>> transitioner = Transitioner(slew_rate=2*u.deg/u.second)
>>> # Schedule the observing blocks using the simple scheduler
>>> schedule = Schedule(Time('2016-07-06 19:00'), Time('2016-07-07 19:00'))
>>> scheduler = SimpleScheduler(observer = apo, transitioner = transitioner,
... constraints = [])
>>> scheduler(blocks, schedule)
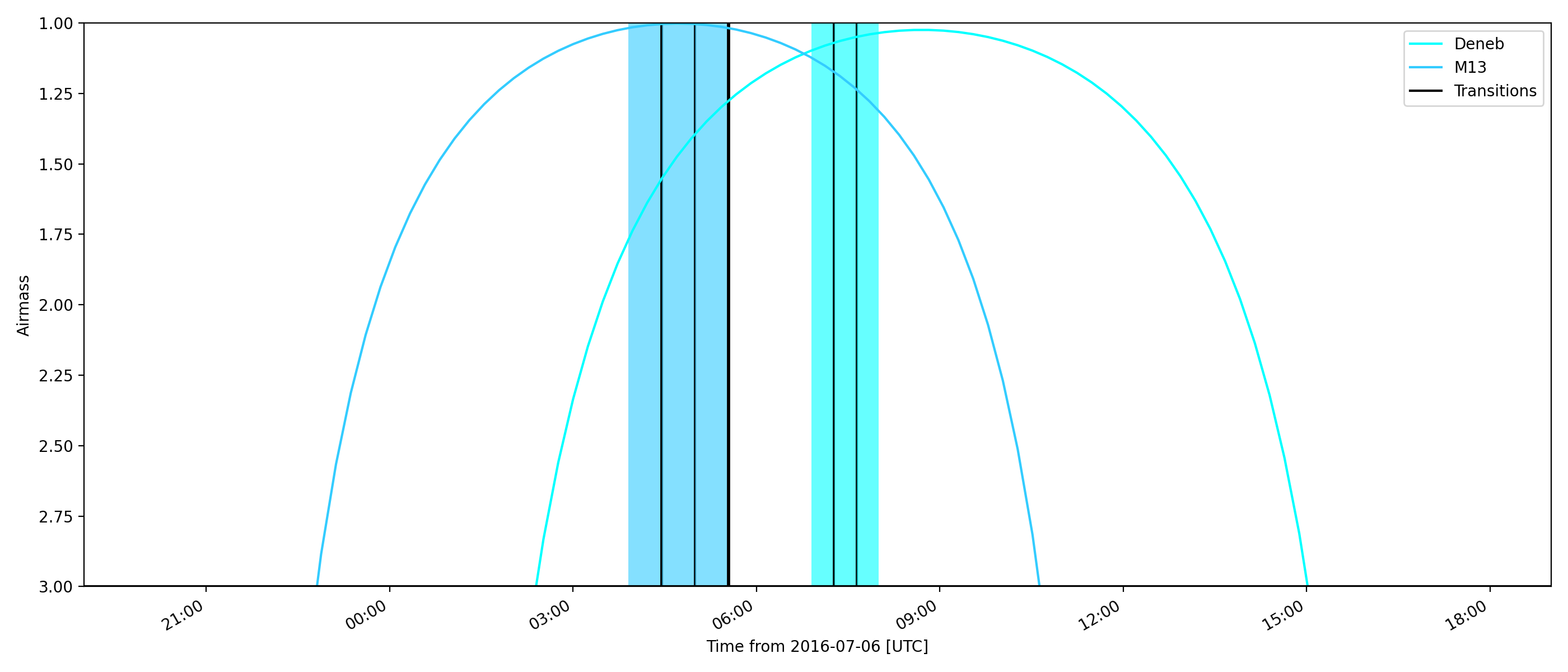
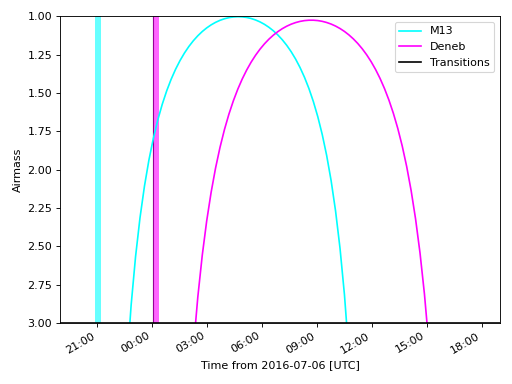
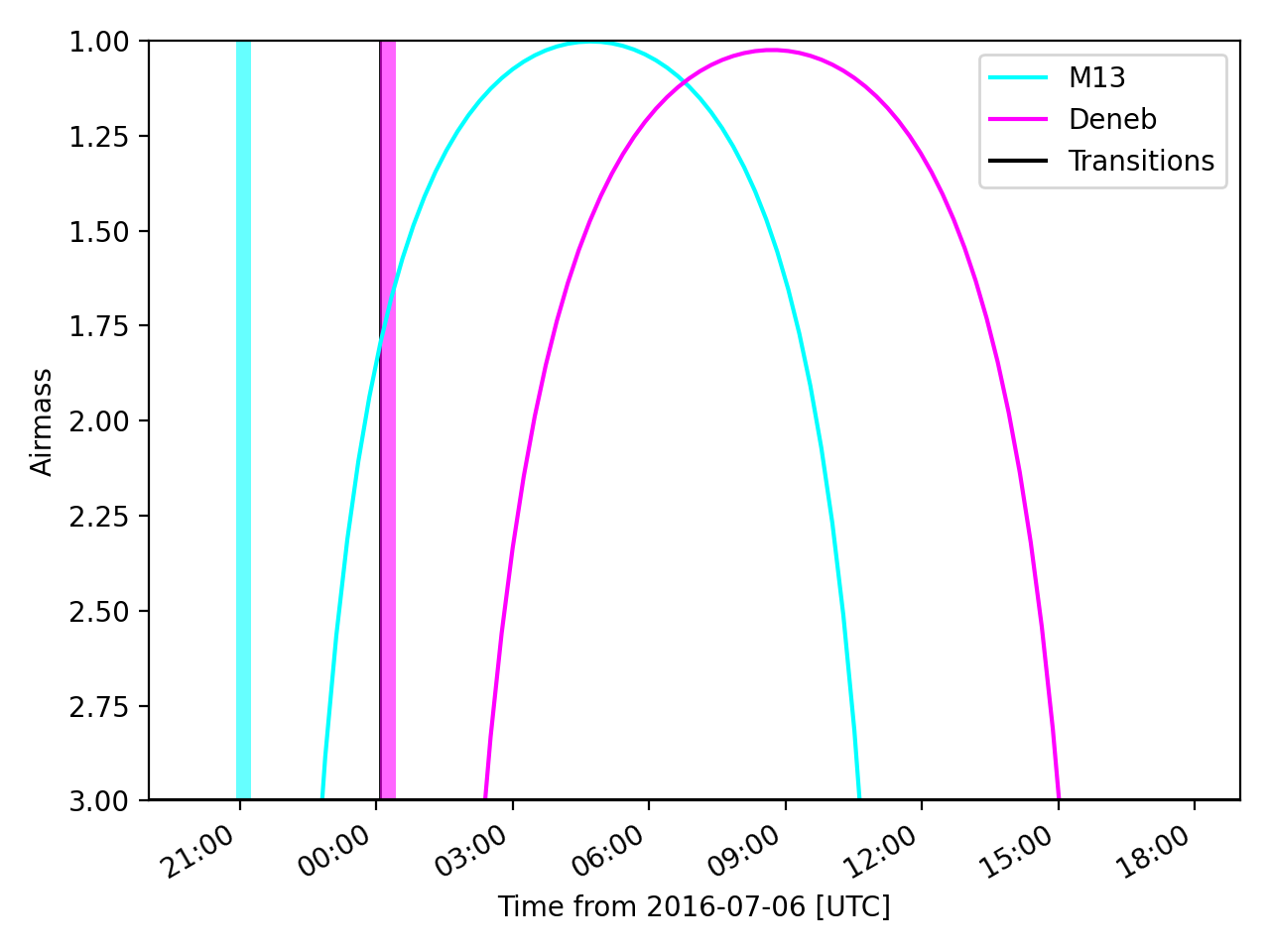
>>> # Plot the created schedule
>>> import matplotlib.pyplot as plt
>>> from astroplan.plots import plot_schedule_airmass
>>> plot_schedule_airmass(schedule)
>>> plt.legend()
>>> plt.show()
(Source code, png, hires.png, pdf, svg)
{kind=link}
{kind=link}
{kind=link}
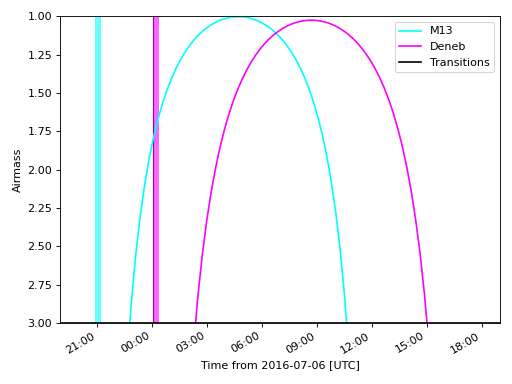
We gave the scheduler no constraints, global or local, so it added the default
AltitudeConstraint which is only satisfied when the targets are above the
horizon. Therefore the ObservingBlocks are scheduled at the first available time
after the target rises, which occurs at much higher airmass than the plot shows.
Using the Scorer#
The Scheduler defined above uses create_score_array,
which creates an array with dimensions (# of blocks, schedule duration/time_resolution).
The Score of any element (block, time) in that array is made by
multiplying the scores returned by all of the constraints for that
target and time.
If you wish to use a different method of score evaluation, you can
add a new method to the Scorer. The general framework of the
create_score_array method will ensure evaluation of all of the
constraints, but change how it combines the scores from the separate
constraints (e.g. add the reciprocals of the scores together and then
use smaller values as better). If you create a method that might be
generically useful to other users, consider submitting it so that others will
be able to use it as well.